How to build a simple Line Tracer Robot??


Some Advanced Line Tracers
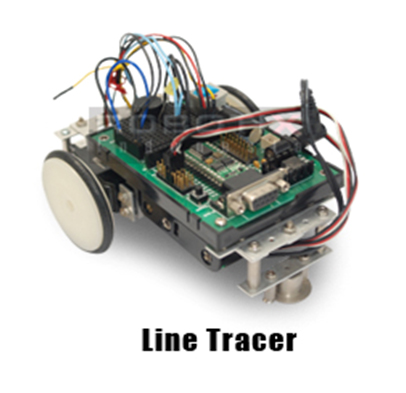
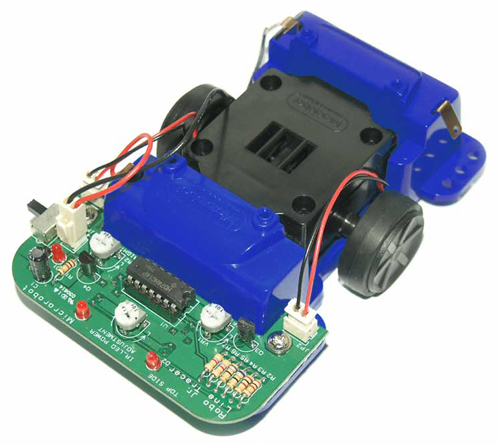




Line Tracer or Line Follower Robot is one of the simplest bots fit for an amateur to dig into the vast field of Robotics. The same bot can be made complex in Mechanical implementation if precision requirement is more. Lets have a look on how simply a Line Tracer can be constructed.
Requirements:
- Two DC Gearhead Motors: Can be 45 rpm or 100rpm or even more. 45/100 rpm may be better for beginners.
- Motor Driver IC L293D
- Comparator IC LM324
- Sensor Network : TSOP/(IR led-Photodiode) sensors may be used. Failure chance for TSOP is more. So neglect it. Lets proceed with IR LED- Photodiode Pair. A minimum of 2 sensor networks may be used.
- Castor Wheel for support (Typical Reverse Rickshaw design)
Working Principle:IR LED must be forward biassed (+5V) and Photodiode reverse biassed (-5V). The sensors must be arranged such that the radiations from IR LED must reach within the proximity of the photodiode in case of reflections from a white surface. Ideally, the reflectivity of white surface is 1 and that for black surfaces is 0. The Line tracer works on the above principle for distinguishing white and black surfaces. The difference in analog between the two surfaces must be made digital. The comparator IC LM324 is used for this purpose.
The comparator will give outputs either high or low which can be adjusted for black /white respectively or in the reverse order by adjusting the input of the comparator IC( inverting/non-inverting inputs).Suppose that white gives HIGH and Black LOW. The output from comparator must be coupled to the motor driver IC L293D accordingly.
Sensor Arrangement: At least there must be two sensors. I will discuss the case of two sensors. The sensors must be arranged such that the line to be followed lies between them. i.e, the two sensors senses the ouside of the required line.This is to facilitate the differentiation of turns. Take the case of a black line to be traced in a white background.The robot must be set to motion when both sensors detect white.In case if left sensor detects black and right sensor white, then a turn to left is detected and reverse for the case of a right turn.As soon as a left turn is detected the left tyre( motors connected directly to tyre) must be stopped and right motor must only rotated. Or even the left tyre (motor) may be rotated in the reverse direction. The reverse is the case with a right turn. The direction of rotation of the motor may be adjusted by controlling the input signals to motor driver IC.
In case of a black background with white lines, the logic must be reversed.
Some Negatives: The robot will move forward if it is kept in a white background without any black line and it will stay still if kept in a black Background. The bot will stop at Junctions. these defects can be eliminated by using a microcontroller chip which is programmed to our requirements.
For any further doubts, do comment.
- Links to all my hubs
This hub provides links to all my hubs.

")
")


