My Favorite Projects With MPASM

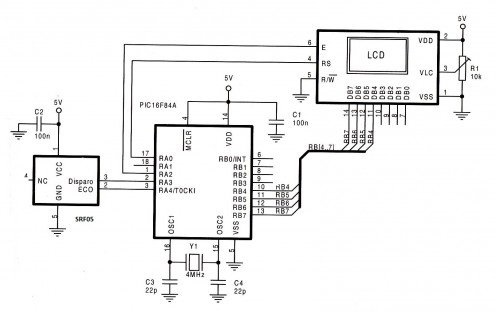
1) SRF05 Sensor With PIC16F84A
This project can serve to monitor the distance of an object by means of ultrasound and an LED is activated when the distance is less than 5 cm. This sensor could be used to activate a solenoid to control the flow of a liquid such as water.
The SRF005 ultrasonic range sensor detects objects in it’s path and can be used to calculate the range to the object. It is sensitive enough to detect a 3cm diameter broom handle at a distance of over 3m.

Download code:
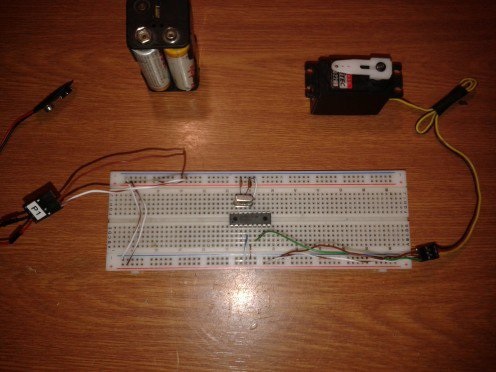
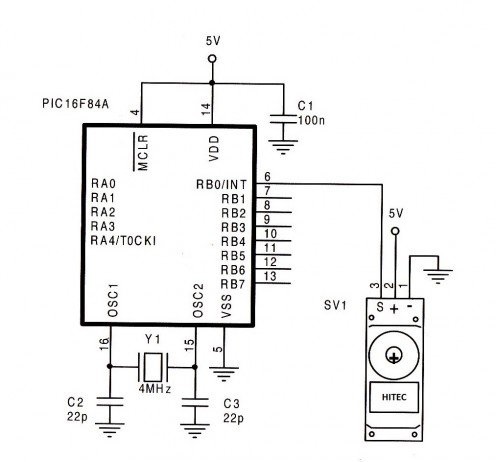
2) Servo Motor Project With PIC16F84A
Project used to test the servomotors by the microcontroller PIC16F84-A and programmed in assembly language.
Servos are extremely useful in robotics. The engines are small, when you look at the picture above, it has internal circuitry internal control and is extremely powerful for its size. A normal or Standard Hitec servo is 42 ounces per inch or better 3kg per cm. of torque that is strong enough for its size. Also proorcional power to mechanical loads. A servo, therefore, does not consume much energy.
Download code:
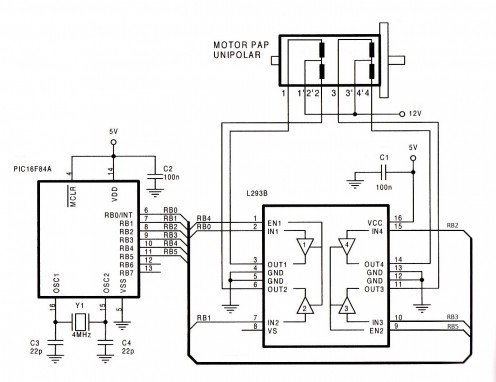
3) Steeper Motor - PAP With PIC16F84A
This project used to test engines unipolar and bipolar stepper by the microcontroller PIC16F84-A and programmed using assembly language.
The stepper motors are commonly used in situations where a certain degree of accuracy is required, for example in the floppy drives mentioned above can find it attached to the head making him forward, backward or positioned in a region of data hosted on the diskette.
The angle of rotation of these motors is varied going from 90 up to 1.8 ° and even 0.72º, each angle of rotation (also called step) is carried out by sending a pulse on one of its terminals, ie for example in 90 motors having rotation by step, 4 pulses are required to make a complete circle, while those of 1.8 ° need 200 pulses, and others need 500.